

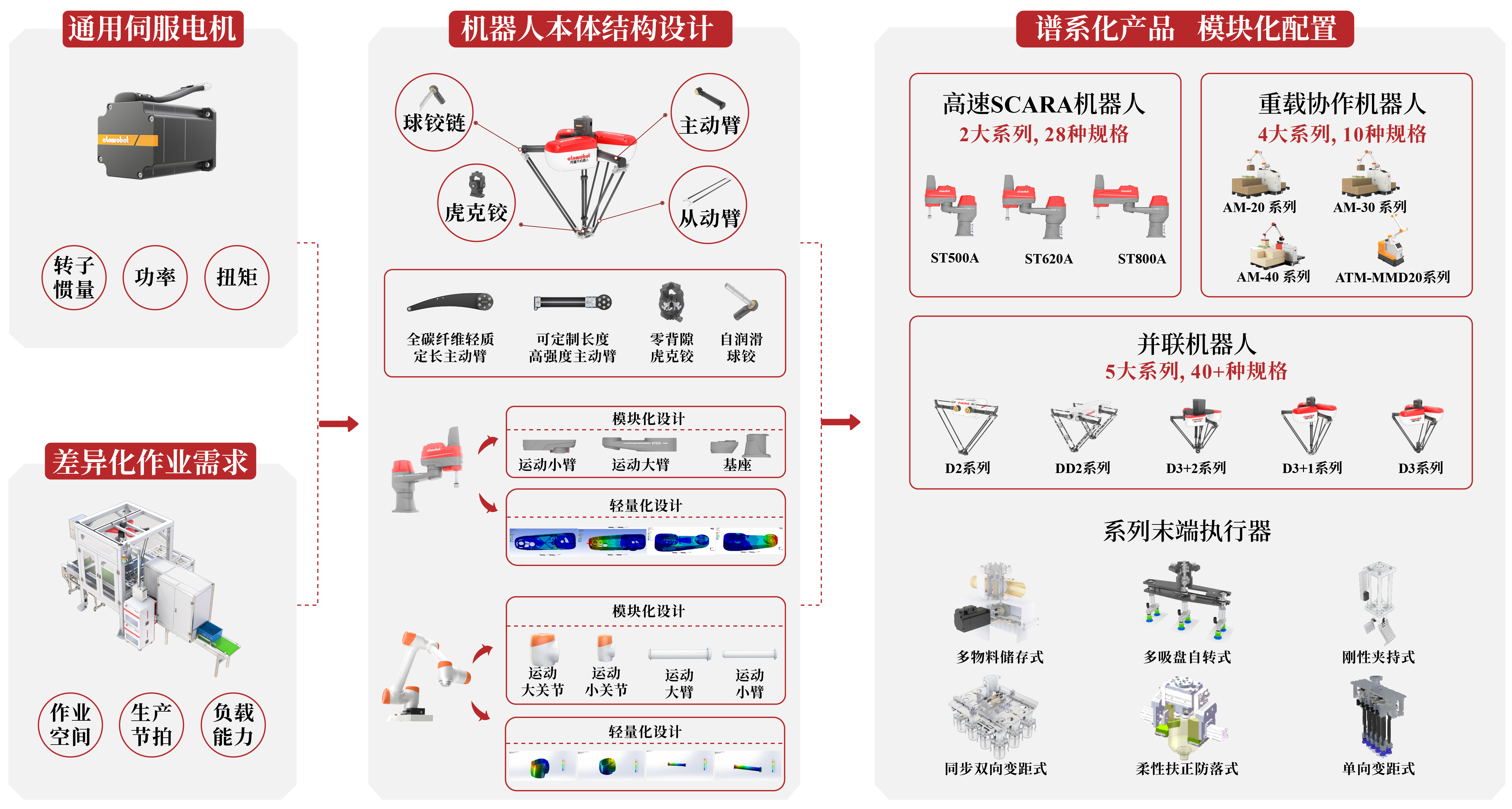
机器人设计与制造技术
依托正向设计与先进工艺体系,融合轻量化结构、自研高性能部件及数字化精密装配,实现了高速SCARA机器人±0.02mm、并联机器人±0.05mm的重复定位精度,构建了覆盖2-6自由度全系列并联机器人、高速SCARA机器人以及重载协作机器人的完整产品矩阵。
驱控一体软硬件集成技术
自主研发的驱控一体运动控制系统由AtomMotion控制平台与高速驱控一体控制器组成,实现从规划到执行的全闭环控制。系统集成动态跟踪与振动抑制等算法,并依托FPGA硬件实现三环控制,在将硬件体积缩减80%、功耗降低20%的同时,保障了高实时性与控制精度。

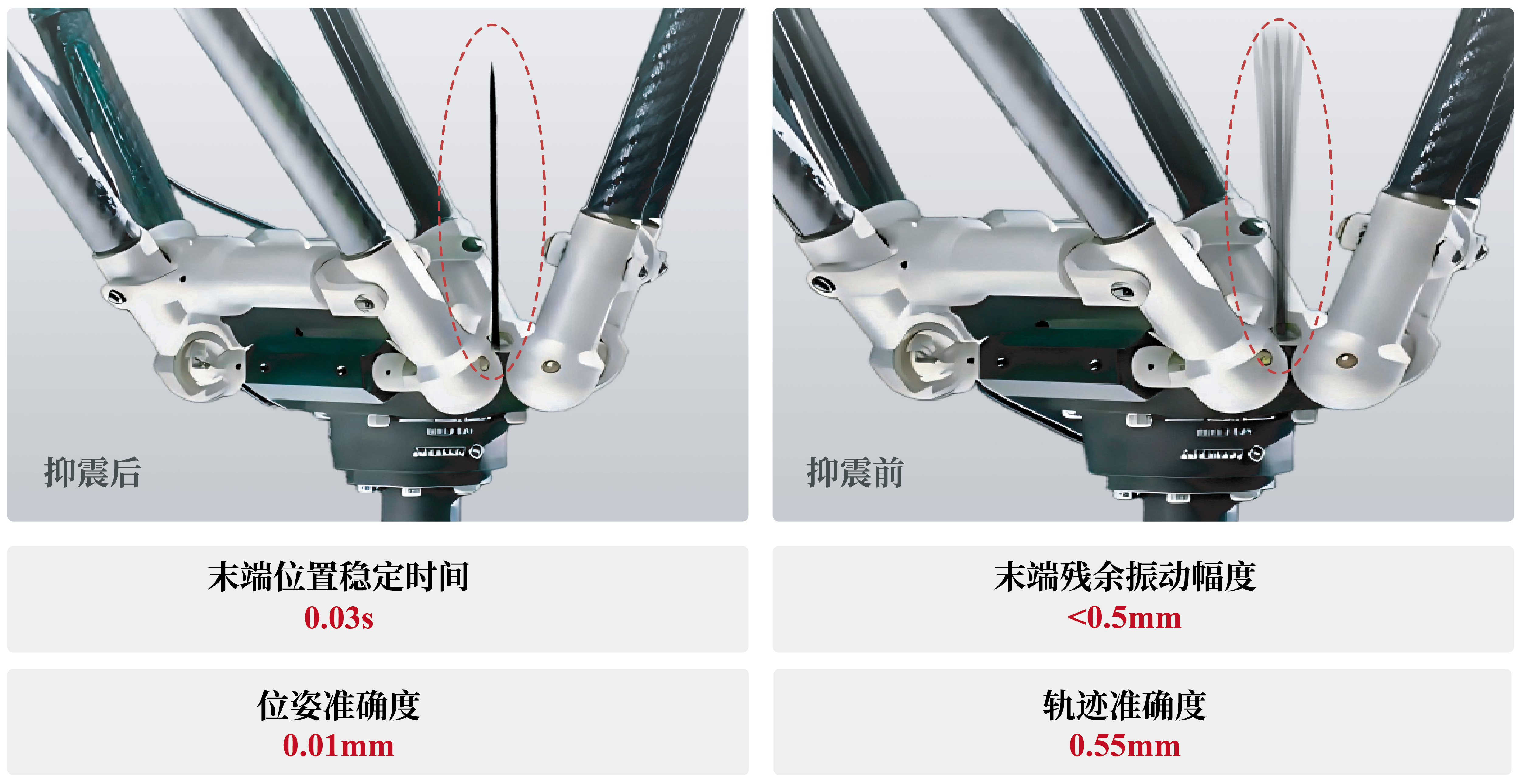
高速高精度运动控制算法
针对高速运动中的轨迹精度、振动抑制与多关节协同控制等挑战,我们融合高阶样条规划与加加速度约束,结合基于输入整形的自适应抑振算法,并通过将反馈控制与考虑轴间耦合作用的前馈控制相结合,实现了高速高负载下的快速稳定、精准轨迹跟踪与平稳动态响应。
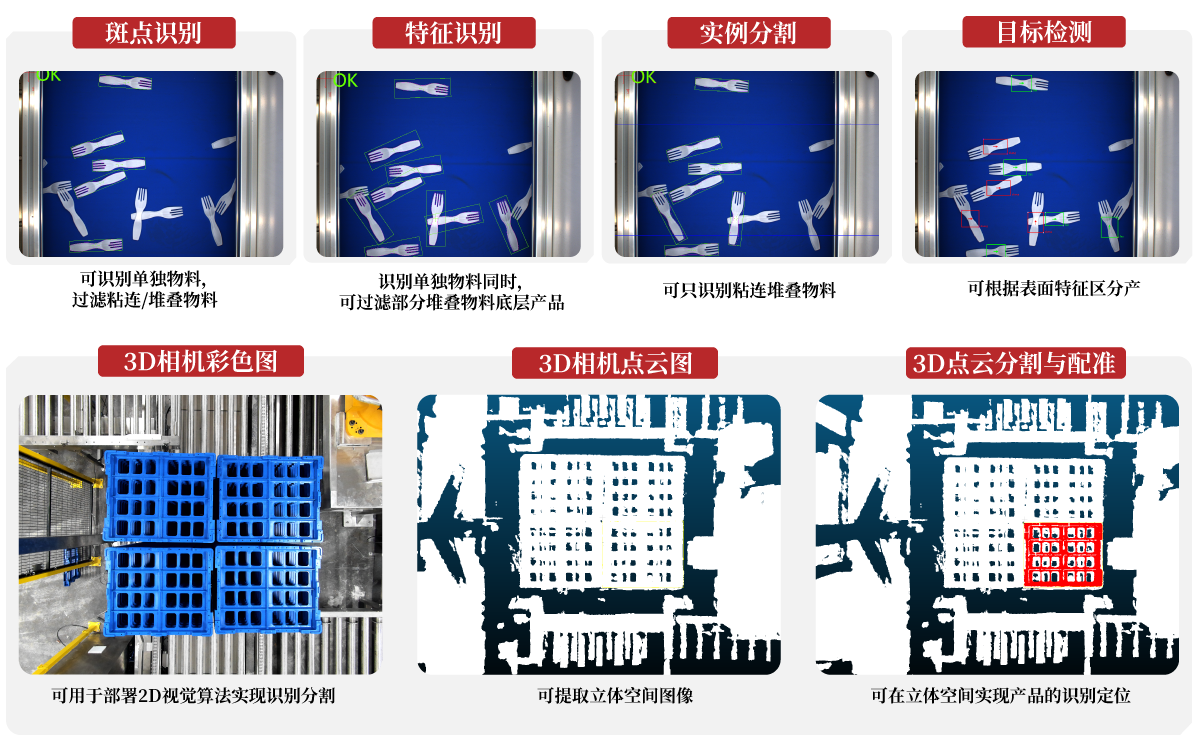
全栈AI视觉识别算法
AtomVision全栈AI视觉平台基于2D/3D感知与深度学习,实现识别、定位、引导到检测的全流程视觉能力。 硬件兼容国内外主流相机品牌,平台算法封装为标准功能模块,支持与AtomMotion编程环境无缝集成,大幅降低部署复杂度。
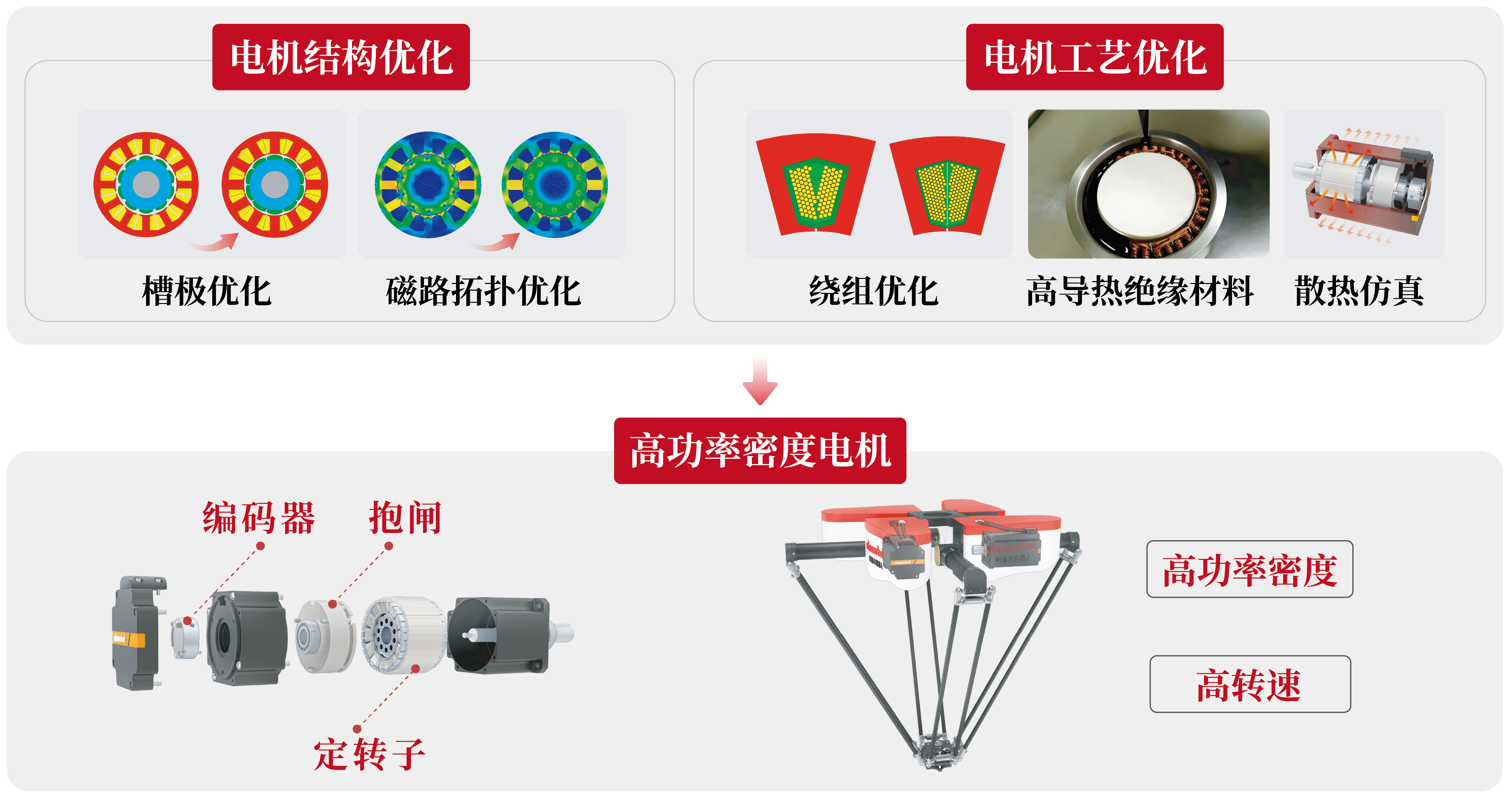
自研高功率密度电机
基于对高速分拣与精密装配场景的深入理解,通过优化磁路与极槽配合,采用紧凑绕组及高导热封装工艺,在有限体积内显著提升转矩与功率密度。结合壳体热管理优化,电机可在高负载下持续稳定运行,从动力源头确保机器人实现平滑、精准且高动态的全程响应。



 津公网安备 12011602300782
津公网安备 12011602300782