-

S6-V1-P200
经典的STEWART并联机构,轻松实现空间6自由度运动,负载达到200kg,满足追求最高精度和最大负载需求。非常适于实验室、航空航天等行业的高精度测试作业,主要用于各种物料的装配和动作模拟等。
最大负载:200kg 轴数:6 最高运动速度:300mm/s 本体重量:768kg -
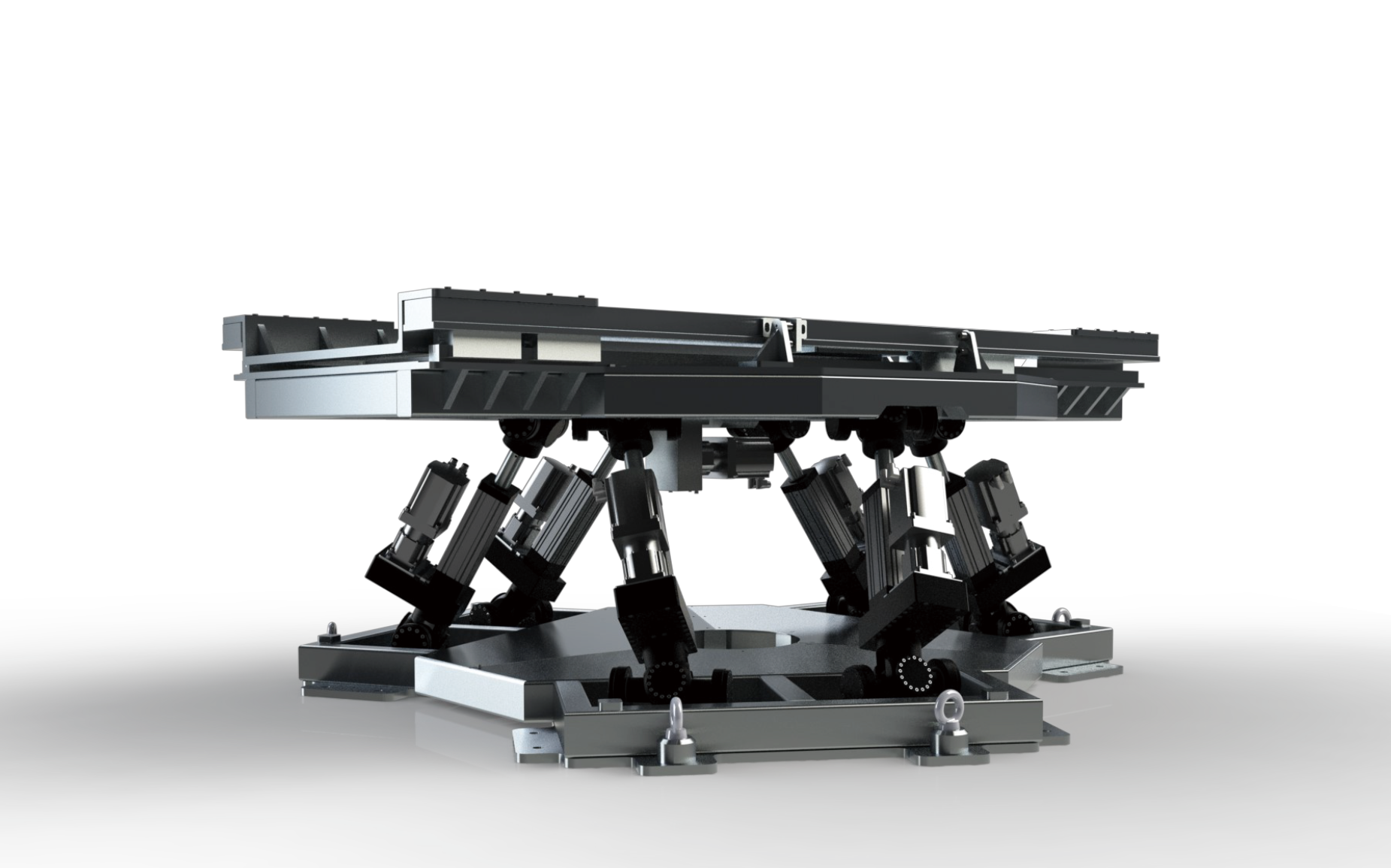
S6-V2-P3000
经典的STEWART并联机构,轻松实现空间6自由度运动,负载达到3000kg,满足追求最高精度和最大负载需求。非常适于实验室、航空航天等行业的高精度测试作业,主要用于各种物料的装配和动作模拟等。
最大负载:3000kg 轴数:6 最高运动速度:100mm/s 本体重量:3730kg -
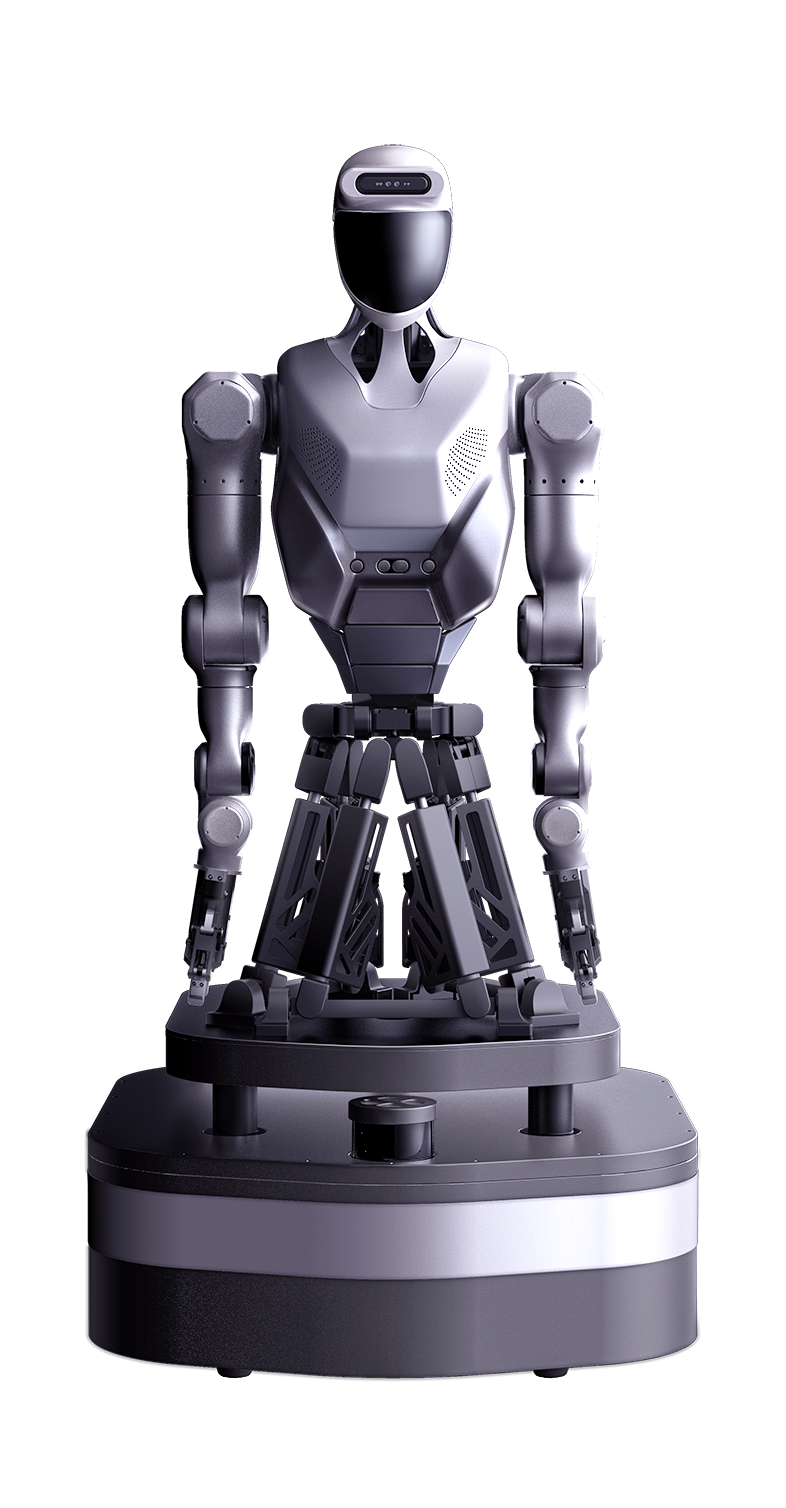
天兵一号AR-H1
全栈自研具身智能机器人
身高:165-175cm 体重:200kg 移动速度:1.25m/s 单臂最大负载:12.5kg 全身自由度:27 DOF -
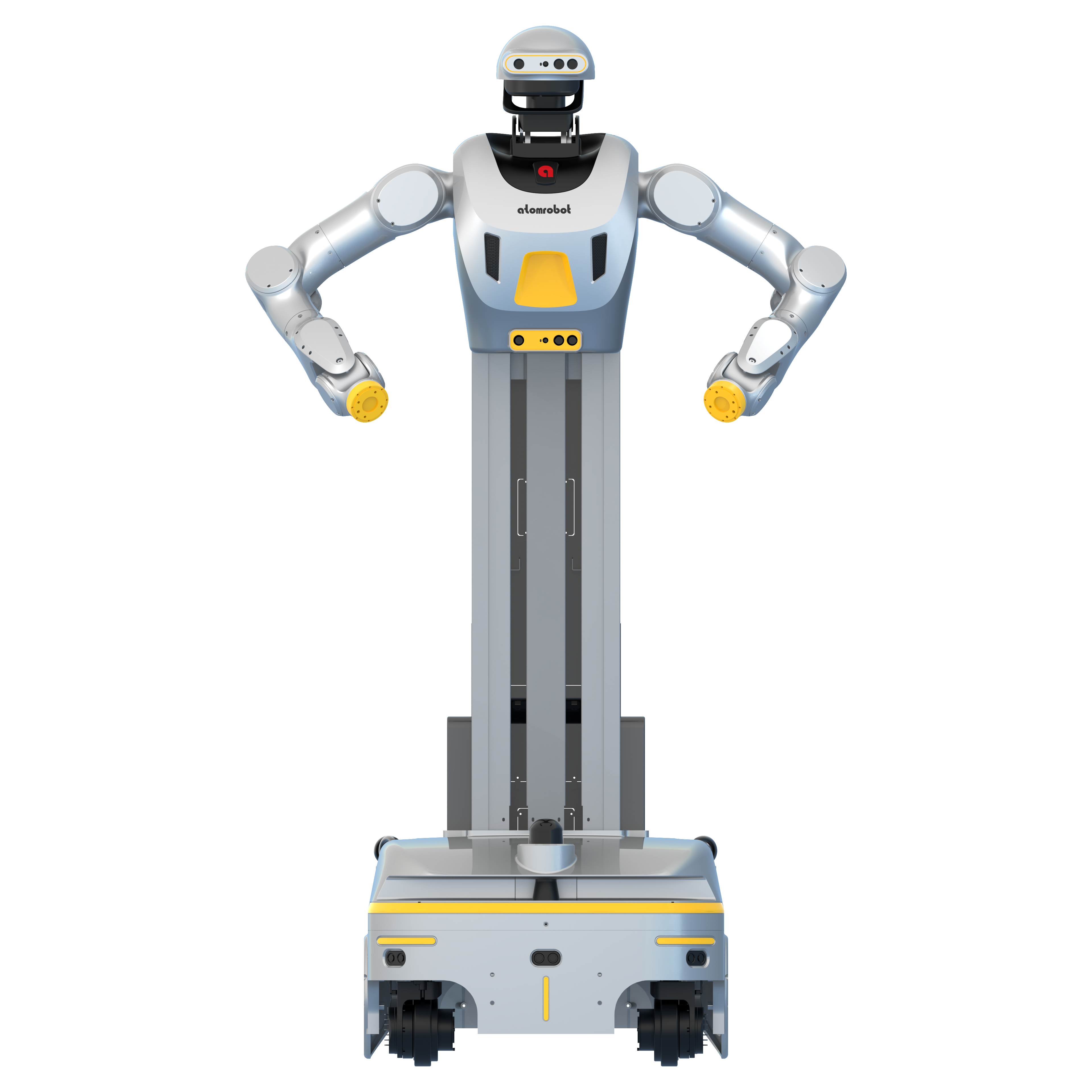
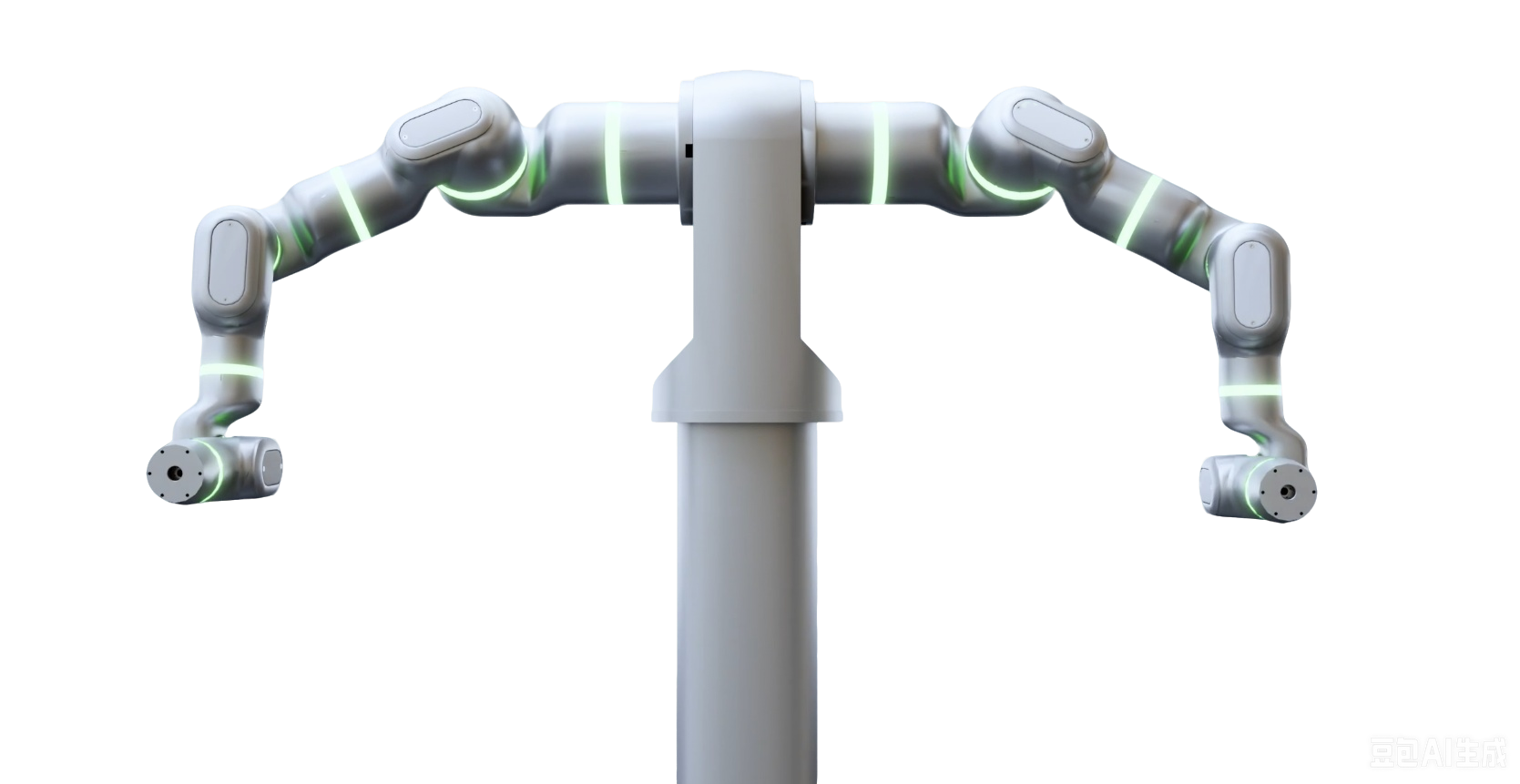
天将一号 AR-H2
阿童木轮式升降双臂具身智能机器人
身高:185.1cm 体重:220kg 移动速度:1.5m/s 单臂最大负载:12kg 全身自由度:25 DOF -
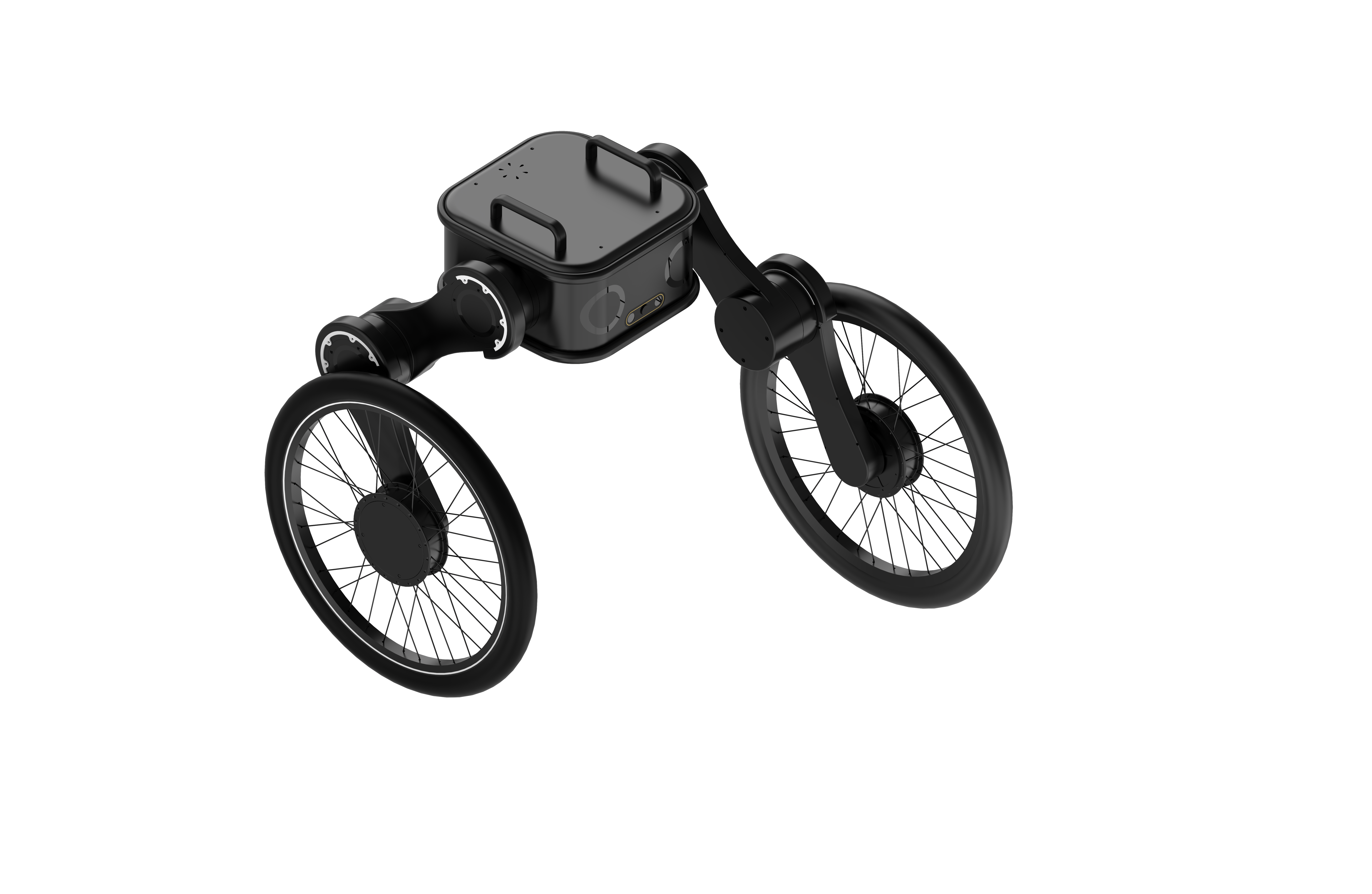
天巡 AR-W1
阿童木轮式巡检智能机器人
身高:81cm 体重:30kg 移动速度:2m/s 负载能力:8kg 全身自由度:6 DOF -
天臂AR-A7
阿童木七轴协作力控机械臂
最大速度:1500mm/s 额定负载:10kg 全身自由度:7 DOF -

S20-8145U-CS
i.配备x86架构,支持不同性能控制器 ii.配备千兆以太网接口,支持交互视觉定位信息,实现实时追踪 iii.配备EtherCAT总线通信协议接口,高实时性,支持各种网络拓扑结构 iv.配备高性能处理器,具有强大的运算能力,满足机器人高速度、高精度、高稳定性控制需求 v.使用自主开发的模块化编程语言,同时整合软PLC,支持符合IEC61131-3标准的的ST、1L、LD、FBD、SFC语言编程,高效、灵活的编写复杂控制程序 vi.支持最多1GB的大容量变量处理,支持被控设备运行的同时进行数据的收集、处理总线诊断、超时监测、WatchDog(看门狗)监视
IO模块:自主 示教器:有线 编码器:有 高速计数输入:自主 -

A20-ATM02
i.配备x86架构,支持不同性能控制器 ii.配备千兆以太网接口,支持交互视觉定位信息,实现实时追踪 iii.配备EtherCAT总线通信协议接口,高实时性,支持各种网络拓扑结构 iv.配备高性能处理器,具有强大的运算能力,满足机器人高速度、高精度、高稳定性控制需求 v.使用自主开发的模块化编程语言,同时整合软PLC,支持符合IEC61131-3标准的的ST、1L、LD、FBD、SFC语言编程,高效、灵活的编写复杂控制程序 vi.支持最多1GB的大容量变量处理,支持被控设备运行的同时进行数据的收集、处理总线诊断、超时监测、WatchDog(看门狗)监视
IO模块:自主 示教器:有线 编码器:有 高速计数输入:自主 -

ARC-1100-S7R16
i.配备x86架构,支持不同性能控制器 ii.配备千兆以太网接口,支持交互视觉定位信息,实现实时追踪 iii.配备EtherCAT总线通信协议接口,高实时性,支持各种网络拓扑结构 iv.配备高性能处理器,具有强大的运算能力,满足机器人高速度、高精度、高稳定性控制需求 v.使用自主开发的模块化编程语言,同时整合软PLC,支持符合IEC61131-3标准的的ST、1L、LD、FBD、SFC语言编程,高效、灵活的编写复杂控制程序 vi.支持最多1GB的大容量变量处理,支持被控设备运行的同时进行数据的收集、处理总线诊断、超时监测、WatchDog(看门狗)监视
IO模块:自主 示教器:有线 编码器:有 高速计数输入:自主




 津公网安备 12011602300782
津公网安备 12011602300782